DARTS
May 9, 2021
·
1 min read
Enhance global mapping of surface topography and 3D vegetation using multi-static SAR observations.
Below are some images taken during some of our flight tests at North Field, Caltech.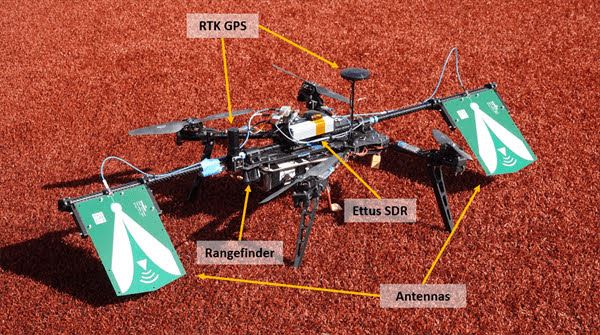


Enhance global mapping of surface topography and 3D vegetation using multi-static SAR observations.
Below are some images taken during some of our flight tests at North Field, Caltech.